sumber : https://www.facebook.com/muhammad.arifmajdi/posts/385433261657145
Mungkin ini adalah pertemuan sakral yang: dialami oleh Prof. DR. H.
Kadirun Yahya, M.Sc – seorang angkatan 1945, ahli sufi, ahli fisika dan
pernah menjabat sebagai rektor Universitas Panca Budi, Medan - dengan
Presiden RI pertama Ir. Soekarno.
Ia bersama rombongan saat itu
diterima di beranda Istana Merdeka (sekitar bulan Juli 1965) bersama
dengan Prof. Ir. Brojonegoro (alm), Prof. dr. Syarif Thayib, Bapak
Suprayogi, Admiral John Lie, Pak Sucipto Besar, Kapolri, dan Duta Besar
Belanda.
“Wah, pagi-pagi begini saya sudah dikepung oleh 3
Profesor-Profesor” kelakar Ir. Soekarno membuka dialog ketika menemui
rombongan Prof. Kadirun Yahya beserta rombongan. Kemudian Presiden
Soekarno mempersilakan rombongan tamunya untuk duduk.
“Profesor Kadirun Yahya silakan duduk dekat saya”, pinta presiden Soekarno kepada Prof. Kadirun Yahya, terkesan khusus.
“Professor, ik horde van jou al sinds 4 jaar, maar nu pas onmoet ik
jou, ik wou je eigenlijk iets vragen (saya dengar tentang engkau sudah
sejak 4 tahun, tapi baru sekarang aku ketemu engkau, sebenarnya ada
sesuatu yang akan aku tanyakan padamu),” kata presiden Soekarno dengan
bahasa Belanda.
“Ya, tentang apa itu Bapak Presiden…?”
“Tentang sesuatu hal yang sudah kira-kira 10 tahun, saya cari-cari
jawabannya, tapi belum ketemu jawaban yang memuaskan. Saya sudah
bertanya pada semua ulama dan para intelektual yang saya anggap tahu.
Tetapi semua jawabannya tetap tidak memuaskan saya.”
“Lantas soalnya apa bapak Presiden?”
"Saya bertanya terlebih dahulu tentang yang lain, sebelum saya majukan pertanyaan yang sebenarnya” jawab Presiden Soekarno.
“Baik Presiden” kata Prof. Kadirun Yahya
“Manakah yang lebih tinggi, Presiden atau Jenderal atau Profesor
dibanding dengan sorga?” tanya Presiden. “Sorga” jawab Prof.Kadirun
Yahya.
“Accoord (setuju)”, balas Presiden terlihat lega.
Menyusul Presiden bertanya untuk soal berikutnya. “Lantas manakah yang
lebih banyak dan lebih lama pengorbanannya antara pangkat-pangkat dunia
yang tadi dibanding dengan pangkat sorga?” tanyanya.
“Untuk
Presiden, Jenderal, Profesor harus berpuluh-puluh tahun berkorban dan
ber-abdi pada Negara, nusa dan bangsa atau pada ilmu pengetahuan.
Sedangkan untuk mendapatkan sorga harus berkorban untuk Allah
segala-galanya. Berpuluh-puluh tahun terus menerus, bahkan menurut agama
Hindu atau Budha harus beribu-ribu kali hidup dan berabdi, baru
barangkali dapat masuk Nirwana," jawab Prof. Kadirun.
“Accoord”, kata Bung Karno (panggilan akrab Presiden).
“Nu heb ik je te pakken Professor (sekarang baru dapat kutangkap engkau
Profesor)” lanjut Bung Karno. Tampak mukanya cerah berseri dengan
senyumnya yang khas. Dan kelihatannya Bung Karno belum ingin cepat-cepat
bertanya untuk yang pokok masalah. “Saya cerita sedikit dulu” kata Bung
Karno.
“Silakan Bapak Presiden”.
“Saya telah banyak
melihat teman-teman saya meninggal dunia lebih dahulu dari saya, dan
hampir semuanya matinya jelek karena banyak dosa rupanya. Sayapun banyak
dosa dan saya takut mati jelek. Maka saya selidiki Al-Quran dan
Al-Hadits bagaimana caranya supaya dengan mudah hapus dosa saya dan
dapat ampunan dan bisa mati tersenyum."
"Lantas saya ketemu
dengan satu Hadits yang bagi saya berharga. Bunyinya kira-kira sebagai
berikut : Rasulullah berkata; Seorang wanita penuh dosa berjalan di
padang pasir, bertemu dengan seekor anjing dan kehausan. Wanita tadi
mengambil gayung yang berisikan air dan memberi minum anjing yang
kehausan itu. Rasul lewat dan berkata: Hai para sahabatku. Lihatlah,
dengan memberi minum anjing itu, hapus dosa wanita itu dunia dan
akhirat. Ia ahli sorga”.
“Nah Profesor, tadi engkau katakan bahwa
untuk mendapatkan sorga harus berkorban segala-galanya, berpuluh-puluh
tahun untuk Allah baru dapat masuk sorga. Itupun barangkali. Sementara
sekarang seorang wanita yang berdosa dengan sedikit saja jasa, itupun
pada seekor anjing pula, dihapuskan Tuhan dosanya dan ia ahli sorga. How
do you explain it Professor?” Tanya Bung Karno lanjut. Profesor Kadirun
Yahya terlihat tidak langsung menjawab. Ia hening sejenak. Lantas
berdiri dan meminta kertas.
"Presiden, U zei, det U in 10 jaren’t
antwoord niet hebt kunnen vinden, laten we zien (Presiden, tadi bapak
katakan dalam 10 tahun tak ketemu jawabannya, coba kita lihat),
mudah-mudahan dengan bantuan Allah dalam 2 menit saja saya coba
memberikan jawabannya dan memuaskan”, katanya.
Keduanya adalah sama-sama eksakta, Bung Karno adalah seorang insinyur dan Profesor Kadirun Yahya adalah ahli kimia/fisika.
Di atas kertas Prof. Kadirun mulai menuliskan penjelasannya.
10/10 = 1 ;
“Ya” kata Presiden.
10/100 = 1/10 ; “Ya” kata Presiden.
10/1000` = 1/100 ;
“Ya” kata Presiden.
10/10.000 = 1/1000 ;
“Ya” kata Presiden.
10 / ∞ (tak terhingga) = 0 ;
“Ya” kata Presiden.
1000.000 … / ∞ = 0 ;
“Ya” kata Presiden.
(Berapa saja + Apa saja) /∞ = 0;
“Ya” kata Presiden.
Dosa / ∞ = 0 ;
“Ya” kata Presiden. ———————————————–“
Nah…” lanjut Prof,
1 x ∞ = ∞ ;
“Ya” kata Presiden
½ x ∞ = ∞ ;
“Ya” kata Presiden.
1 zarah x ∞ = ∞ ;
“Ya” kata Presiden.
“… ini artinya, sang wanita, walaupun hanya 1 zarah jasanya, bahkan
terhadap seekor anjing sekalipun, mengkaitkan, menggandengkan gerakannya
dengan yang Maha Akbar."
"Mengikutsertakan yang Maha Besar
dalam gerakan-gerakannya, maka hasil dari gerakannya itu menghasilkan
ibadah yang begitu besar, yang langsung dihadapkan pada dosa-dosanya,
yang pada saat itu juga hancur berkeping-keping. Ditorpedo oleh PAHALA
yang Maha Besar itu. 1 zarah x ∞ = ∞ Dan, Dosa / ∞ = 0.
Ziedaar hetantwoord, Presiden (Itulah dia jawabannya Presiden)” jawab Profesor.
Bung Karno diam sejenak . “Geweldig (hebat)” katanya kemudian. Dan Bung Karno terlihat semakin penasaran.
Masih ada lagi pertanyaan yang ia ajukan. “Bagaimana agar dapat hubungan dengan Tuhan?” katanya.
Profesor Kadirun Yahya pun lanjut menjawabnya. “Dengan mendapatkan
frekuensi-Nya. Tanpa mendapatkan frekuensi-Nya tak mungkin ada kontak
dengan Tuhan."
"Lihat saja, walaupun 1 mm jaraknya dari sebuah
zender radio, kita letakkan radio dengan frekuensi yang tidak sama, maka
radio kita itu tidak akan mengeluarkan suara dari zender tersebut.
Begitu juga dengan Tuhan, walaupun Tuhan berada lebih dekat dari kedua
urat leher kita, tak mungkin ada kontak jika frekuensi-Nya tidak kita
dapati”, jelasnya.
“Bagaimana agar dapat frekuensi-Nya, sementara kita adalah manusia kecil yang serba kekurangan ?” tanya Presiden kemudian.
“Melalui isi dada Rasulullah” jawab Prof.
“Dalam Hadits Qudsi berbunyi yang artinya : Bahwasanya Al-Quran ini
satu ujungnya di tangan Allah dan satu lagi di tangan kamu, maka
peganglah kuat-kuat akan dia” (Abi Syuraihil Khuza’ayya.r.a), lanjutnya.
Prof menyambung, “Begitu juga dalam QS.Al-Hijr :29 – Maka setelah Aku
sempurnakan dia dan Aku tiupkan di dalamnya sebagian rohKu, rebahkanlah
dirimu bersujud kepadaNya”.
"Nur Illahi yang terbit dari Allah
sendiri adalah tali yang nyata antara Allah dengan Rasulullah. Ujung Nur
Illahi itu ada dalam dada Rasulullah. Ujungnya itulah yang kita
hubungi, maka jelas kita akan dapat frekuensi dari Allah SWT", kata
Prof.
Prof melanjutkan, "Lihat saja sunnatullah, hanya cahaya
matahari saja yang satu-satunya sampai pada matahari. Tak ada yang
sampai pada matahari melainkan cahayanya sendiri. Juga gas-gas yang
saringan-saringannya tak ada yang sampai matahari, walaupun ‘edelgassen’
seperti : Xenon, Crypton, Argon, Helium, Hydrogen dan lain-lain. Semua
vacuum!
Yang sampai pada matahari hanya cahayanya karena ia terbit
darinya dan tak bercerai siang dan malamnya dengannya. Kalaulah
matahari umurnya 1 (satu) juta tahun, maka cahayanyapun akan berumur
sejuta tahun pula. Kalau matahari hilang maka cahayanyapun akan hilang.
Matahari hanya dapat dilihat melalui cahayanya, tanpa cahaya,
mataharipun tak dapat dilihat”.
"Namun cahaya matahari, bukanlah
matahari – cahaya matahari adalah getaran transversal dan longitudinal
dari matahari sendiri (Huygens)", jelas Prof.
Prof menyimpulkan,
"Dan Rasulullah adalah satu-satunya manusia akhir zaman yang mendapat
Nur Illahi dalam dadanya. Mutlak jika hendak mendapatkan frekuensi
Allah, ujung dari nur itu yang berada dalam dada Rasulullah harus
dihubungi."
“Bagaimana cara menghubungkannya, sementara Rasulullah sudah wafat sekian lama?” tanya Presiden. “
Prof menjawab, "Memperbanyak sholawat atas Nabi tentu akan mendapatkan
frekuensi Beliau, yang otomatis mendapat frekuensi Allah SWT.
–Tidak kukabulkan doa seseorang, tanpa shalawat atas Rasul-Ku. Doanya tergantung di awang-awang – (HR. Abu Daud dan An-Nasay).
Jika diterjemahkan secara akademis mungkin kurang lebih : “Tidak engkau
mendapat frekuensi-Ku tanpa lebih dahulu mendapat frekuensi Rasul-Ku”.
Sontak Presiden berdiri. “You are wonderful” teriaknya. Sejurus
kemudian, dengan merangkul kedua tangan profesor, Presidenpun bermohon :
“Profesor, doakan saya supaya dapat mati dengan tersenyum....dst"
wallahu a'lam
Tuesday, January 12, 2016
Alat Praktikum dengan Interface Komputer
PENGEMBANGAN ALAT
PRAKTIKUM GERAK LURUS MENGGUNAKAN INTERFACE KOMPUTER
oleh : Soni Sukendar
Rita Hartati
A.
Analisis Kebutuhan
Berdasarkan
hasil studi awal dan kajian berbagai bahan pustaka diperoleh spesifikasi
kebutuhan alat praktikum fisika untuk topik GLBB yang dapat memberi solusi
kendala praktikum menggunakan ticker
timer, sebagai berikut.
1.
Alat praktikum yang dapat dirangkai dengan cepat, atau kalau
memungkinkan sudah berupa alat terpadu (modul).
2.
Alat praktikum yang dapat berkomunikasi dengan komputer.
3.
Data yang dikirim oleh alat praktikum ke komputer dapat
diakuisis oleh software pengolah angka dan grafik yang sudah familier di
kalangan pengguna, misalnya MS-Excel.
4.
Tampilan grafik harus menarik dan mudah dipahami siswa.
5.
Harga komponen untuk mengembang alat ini harus relatif murah.
6.
Alat praktikum ini harus mudah dipasang dan dibongkar, serta
mudah untuk digunakan.
7.
Alat praktikum ini dapat dipadukan penggunaanya dengan alat
praktikum yang sudah ada, misalnya KIT fisika.
Dari
spesifikasi tersebut, akhirnya diputuskan untuk mengembangkan alat praktikum
berbasis microcontroller dengan menggunakan IC utama keluaran Atmega seri 328p.
Atmega seri ini sangat mudah untuk diisi program dengan mengunakan lingkungan
pemograman berbasis Arduino. Kelebihan lingkungan pemograman ini dari segi
bahasa sangat sederhana dan dikembangkan dengaan menggunakan bahasa perograman
C. Selain itu cukup banyak tersedia library
dengan lisensi freeware, yang dapat
digunakan untuk menyingkat proses penulisan script terutama scrip untuk
mengakses hardware/ komponen berupa sensor.
Komponen lain yang diperlukan adalah sensor
jarak, dan hasl survey di lapangan dperoleh sensor jarak dengan menggunakan
prinsip kerja pemancaran dan pemantulan gelombang ultrasonik dengan harga yang
cukup murah yaitu sensor ultrasonik HCSR-04. Harga sensor ini sekitar Rp.
35.000.
Untuk koneksi
alat praktikum ke komputer digunakan USB
to serial conector keluaran
prolific seri hxa. Harganya sekitar Rp. 45.000,-.
B. Pembuatan
Alat Praktikum GLBB berbantuan komputer
Setelah
dilakukan analisis kebutuhan, langkah selanjutnya adalah membuat alat prakikum
dengan tahapan sebagai berikut
1. Perancangan rangkaian elektronik
Skema rancangan rangkaian adalah sebagai berikut.
{kind=link}

Gambar 1. Skema rangkaian sistem minimum untuk IC Atmega 328p.
2. Pemilihan komponen
Komponen elektronik yang diperlukan adalah sebagai
berikut.
Tabel 1.
Kebutuhan komponen
Block Controller
|
|
Nama
Komponen
|
Jml
|
IC Atmega
328P-PU
|
1
|
Xtal Resonator
16MHz
|
1
|
C ceramic 22pF
|
2
|
C ceramic 0.1uF
|
2
|
R 1K
|
1
|
R 10K
|
2
|
Tombol reset
|
1
|
led hijau
|
1
|
Block Sensor dan
Actuator
|
|
Nama
Komponen
|
Jml
|
HC SR04
ultrasonik sensor
|
1
|
LCD 1602
|
1
|
mini board
|
2
|
jumper pelangi
10 warna M/M
|
1
|
jumper
|
6
|
3. Menulis script program untuk mikrokontroler
IC Atmega 328p diprogram supaya dapat mengakses data
dari sensor ultrasonik HCSR-04 serta mengirimkan data digitalnya ke komputer
dan dapat dengan mudah diakuisis oleh program MS-Excel. Listing programnya
sebagai berikut.
#include <NewPing.h>
#define TRIGGER_PIN 12 // jumper pin TRIG
sensor ke pin 12 arduino
#define ECHO_PIN 11 // jumper pin ECHO
sensor ke pin 11 arduino
#define MAX_DISTANCE 200 // jarak maks
(cm).
NewPing sonar(TRIGGER_PIN, ECHO_PIN,
MAX_DISTANCE); // bikin class baru
int uS = 0;
int row = 0; //untuk plxdaq
void setup() {
Serial.begin(9600); // buka port serial, sets kecepatan data ke 9600 bps
Serial.println("CLEARDATA");
//untuk plxdaq
Serial.println("LABEL,Waktu,Jarak,Model GLBB oleh Rita Hartati SMKN
13 Bandung"); //untuk plxdaq
}
void loop() {
//Baca pin input
uS
= sonar.ping(); // kirim ping dan simpan hasilnya di variabel uS (satuannya
mikrodetik)
//Kirim ke komputer melalui serial
Serial.print("DATA,TIME,"); Serial.println(uS /
US_ROUNDTRIP_CM);
row++; //untuk plxdaq
uS++; //untuk plxdaq
delay(100);
}
Adapun
library
untuk sensor ultrasonik HCSR-04 diambil dari script yang telah dikembangkan
oleh peneliti lain dengan lisensi free
dari http://www.gnu.org/licenses/gpl-3.0.html
//
---------------------------------------------------------------------------
//
Created by Tim Eckel - teckel@leethost.com
//
Copyright 2012 License: GNU GPL v3 http://www.gnu.org/licenses/gpl-3.0.html
//
// See
"NewPing.h" for purpose, syntax, version history, links, and more.
//
---------------------------------------------------------------------------
#include "NewPing.h"
//
---------------------------------------------------------------------------
//
NewPing constructor
//
---------------------------------------------------------------------------
NewPing::NewPing(uint8_t
trigger_pin, uint8_t echo_pin, int
max_cm_distance) {
_triggerBit =
digitalPinToBitMask(trigger_pin); // Get the port
register bitmask for the trigger pin.
_echoBit =
digitalPinToBitMask(echo_pin); // Get the port register bitmask for the echo pin.
_triggerOutput =
portOutputRegister(digitalPinToPort(trigger_pin)); //
Get the output port register for the trigger pin.
_echoInput =
portInputRegister(digitalPinToPort(echo_pin)); // Get the
input port register for the echo pin.
_triggerMode = (uint8_t *)
portModeRegister(digitalPinToPort(trigger_pin)); //
Get the port mode register for the trigger pin.
_maxEchoTime =
min(max_cm_distance, MAX_SENSOR_DISTANCE) * US_ROUNDTRIP_CM + (US_ROUNDTRIP_CM
/ 2); // Calculate the maximum distance in uS.
#if DISABLE_ONE_PIN == true
*_triggerMode |= _triggerBit; // Set trigger pin to output.
#endif
}
//
---------------------------------------------------------------------------
//
Standard ping methods
//
---------------------------------------------------------------------------
unsigned int
NewPing::ping() {
if
(!ping_trigger()) return NO_ECHO; //
Trigger a ping, if it returns false, return NO_ECHO to the calling function.
while
(*_echoInput & _echoBit) //
Wait for the ping echo.
if (micros() > _max_time) return
NO_ECHO; //
Stop the loop and return NO_ECHO (false) if we're beyond the set maximum
distance.
return
(micros() - (_max_time - _maxEchoTime) - 5); // Calculate
ping time, 5uS of overhead.
}
unsigned int
NewPing::ping_in() {
unsigned
int echoTime = NewPing::ping(); // Calls
the ping method and returns with the ping echo distance in uS.
return
NewPingConvert(echoTime, US_ROUNDTRIP_IN); // Convert
uS to inches.
}
unsigned int
NewPing::ping_cm() {
unsigned
int echoTime = NewPing::ping(); // Calls
the ping method and returns with the ping echo distance in uS.
return
NewPingConvert(echoTime, US_ROUNDTRIP_CM); // Convert
uS to centimeters.
}
unsigned int
NewPing::ping_median(uint8_t it) {
unsigned
int uS[it], last;
uint8_t j, i = 0;
uS[0] = NO_ECHO;
while
(i < it) {
last =
ping(); // Send ping.
if (last == NO_ECHO) { // Ping out of
range.
it--; //
Skip, don't include as part of median.
last
= _maxEchoTime; // Adjust "last" variable
so delay is correct length.
} else { //
Ping in range, include as part of median.
if (i > 0) { //
Don't start sort till second ping.
for (j = i; j > 0 && uS[j - 1] < last;
j--) // Insertion sort loop.
uS[j]
= uS[j - 1]; // Shift ping array to correct position
for sort insertion.
}
else j = 0; //
First ping is starting point for sort.
uS[j]
= last; // Add last ping to
array in sorted position.
i++; //
Move to next ping.
}
if (i < it) delay(PING_MEDIAN_DELAY - (last
>> 10)); // Millisecond delay between pings.
}
return
(uS[it >> 1]); // Return the ping distance
median.
}
//
---------------------------------------------------------------------------
//
Standard ping method support functions (not called directly)
//
---------------------------------------------------------------------------
boolean
NewPing::ping_trigger() {
#if DISABLE_ONE_PIN != true
*_triggerMode |=
_triggerBit; //
Set trigger pin to output.
#endif
*_triggerOutput &=
~_triggerBit; // Set the trigger pin low, should
already be low, but this will make sure it is.
delayMicroseconds(4); // Wait
for pin to go low, testing shows it needs 4uS to work every time.
*_triggerOutput |=
_triggerBit; //
Set trigger pin high, this tells the sensor to send out a ping.
delayMicroseconds(10); // Wait
long enough for the sensor to realize the trigger pin is high. Sensor specs say
to wait 10uS.
*_triggerOutput &=
~_triggerBit; // Set trigger pin back to low.
#if DISABLE_ONE_PIN != true
*_triggerMode &=
~_triggerBit; //
Set trigger pin to input (when using one Arduino pin this is technically setting
the echo pin to input as both are tied to the same Arduino pin).
#endif
_max_time = micros() + MAX_SENSOR_DELAY; //
Set a timeout for the ping to trigger.
while
(*_echoInput & _echoBit && micros() <= _max_time) {} // Wait for echo pin to clear.
while
(!(*_echoInput & _echoBit)) // Wait for ping to start.
if (micros() > _max_time) return
false; //
Something went wrong, abort.
_max_time = micros() +
_maxEchoTime; // Ping started, set the timeout.
return
true; // Ping started successfully.
}
//
---------------------------------------------------------------------------
// Timer
interrupt ping methods (won't work with ATmega8 and ATmega128)
//
---------------------------------------------------------------------------
void NewPing::ping_timer(void (*userFunc)(void))
{
if
(!ping_trigger()) return; // Trigger a
ping, if it returns false, return without starting the echo timer.
timer_us(ECHO_TIMER_FREQ, userFunc);
// Set ping echo timer check every ECHO_TIMER_FREQ
uS.
}
boolean
NewPing::check_timer() {
if
(micros() > _max_time) { // Outside the timeout
limit.
timer_stop(); // Disable
timer interrupt
return false; // Cancel
ping timer.
}
if
(!(*_echoInput & _echoBit)) { // Ping echo
received.
timer_stop(); //
Disable timer interrupt
ping_result =
(micros() - (_max_time - _maxEchoTime) - 13); //
Calculate ping time, 13uS of overhead.
return true; // Return
ping echo true.
}
return
false; // Return
false because there's no ping echo yet.
}
//
---------------------------------------------------------------------------
//
Timer2/Timer4 interrupt methods (can be used for non-ultrasonic needs)
// ---------------------------------------------------------------------------
//
Variables used for timer functions
void (*intFunc)();
void (*intFunc2)();
unsigned long
_ms_cnt_reset;
volatile unsigned
long _ms_cnt;
void NewPing::timer_us(unsigned int
frequency, void (*userFunc)(void)) {
timer_setup(); // Configure
the timer interrupt.
intFunc = userFunc; // User's function to call when there's a timer event.
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
OCR4C = min((frequency>>2)
- 1, 255); // Every count is 4uS, so divide by 4
(bitwise shift right 2) subtract one, then make sure we don't go over 255
limit.
TIMSK4 = (1<<TOIE4); //
Enable Timer4 interrupt.
#else
OCR2A = min((frequency>>2)
- 1, 255); // Every count is 4uS, so divide by 4
(bitwise shift right 2) subtract one, then make sure we don't go over 255
limit.
TIMSK2 |=
(1<<OCIE2A); // Enable Timer2 interrupt.
#endif
}
void NewPing::timer_ms(unsigned long
frequency, void (*userFunc)(void)) {
timer_setup(); //
Configure the timer interrupt.
intFunc =
NewPing::timer_ms_cntdwn; // Timer events are sent here once every ms till user's
frequency is reached.
intFunc2 = userFunc; //
User's function to call when user's frequency is reached.
_ms_cnt = _ms_cnt_reset =
frequency; // Current ms counter and reset value.
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
OCR4C = 249; // Every
count is 4uS, so 1ms = 250 counts - 1.
TIMSK4 = (1<<TOIE4); // Enable Timer4 interrupt.
#else
OCR2A = 249; // Every
count is 4uS, so 1ms = 250 counts - 1.
TIMSK2 |= (1<<OCIE2A); // Enable Timer2 interrupt.
#endif
}
void NewPing::timer_stop() { // Disable timer interrupt.
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
TIMSK4 = 0;
#else
TIMSK2 &=
~(1<<OCIE2A);
#endif
}
//
---------------------------------------------------------------------------
//
Timer2/Timer4 interrupt method support functions (not called directly)
//
---------------------------------------------------------------------------
void NewPing::timer_setup() {
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
timer_stop(); // Disable Timer4 interrupt.
TCCR4A = TCCR4C = TCCR4D =
TCCR4E = 0;
TCCR4B = (1<<CS42) |
(1<<CS41) | (1<<CS40) | (1<<PSR4); //
Set Timer4 prescaler to 64 (4uS/count, 4uS-1020uS range).
TIFR4 = (1<<TOV4);
TCNT4 = 0; // Reset Timer4
counter.
#else
timer_stop(); // Disable
Timer2 interrupt.
ASSR &=
~(1<<AS2); // Set clock, not pin.
TCCR2A = (1<<WGM21); // Set Timer2 to
CTC mode.
TCCR2B = (1<<CS22); // Set Timer2
prescaler to 64 (4uS/count, 4uS-1020uS range).
TCNT2 = 0; // Reset
Timer2 counter.
#endif
}
void NewPing::timer_ms_cntdwn() {
if
(!_ms_cnt--) { // Count down till we reach zero.
intFunc2(); //
Scheduled time reached, run the main timer event function.
_ms_cnt =
_ms_cnt_reset; // Reset the ms timer.
}
}
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
ISR(TIMER4_OVF_vect)
{
#else
ISR(TIMER2_COMPA_vect)
{
#endif
if(intFunc)
intFunc(); // If wrapped function is set, call it.
}
// ---------------------------------------------------------------------------
//
Conversion methods (rounds result to nearest inch or cm).
//
---------------------------------------------------------------------------
unsigned int
NewPing::convert_in(unsigned int echoTime) {
return
NewPingConvert(echoTime, US_ROUNDTRIP_IN); // Convert
uS to inches.
}
unsigned int
NewPing::convert_cm(unsigned int echoTime) {
return
NewPingConvert(echoTime, US_ROUNDTRIP_CM); // Convert
uS to centimeters.
}
4.
Pengisian
program
Setelah selesai menulis script program langkah
selanjutnya adalah mengisi program ke dalam IC Atmega 328p, dengan desain
rangkaian sebagai berikut.
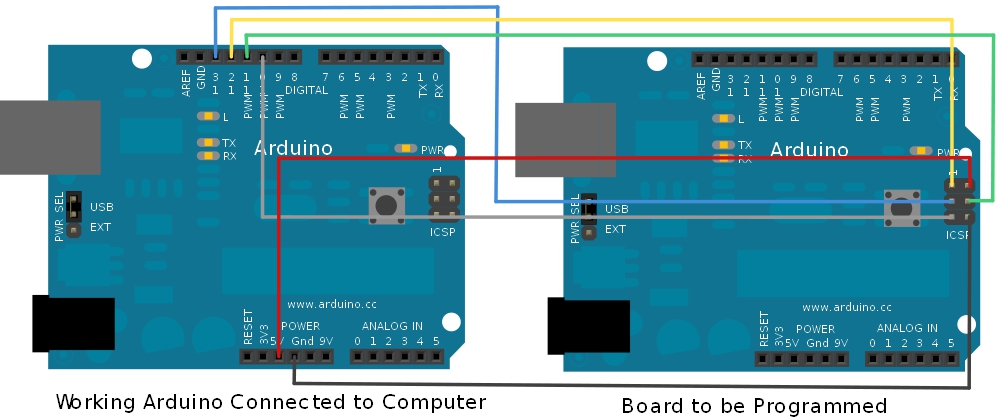{kind=link}

Gambar 2.
Rangkaian pengisian IC Atmega 328p blank.
IC
Atmega 328p yang baru dibeli masih kosong dan tidak dapat diprogram langsung
menggunakan lingkungan pemrogram arduino sehingga perlu diisi bootloader. Supaya IC tersebut siap
dipakai maka peru diprogram menggunakan model ISP (in-Sircuit Programmer)
seperti terlihat pada Gambar 4.2, papan (a) berfungsi sebagai master yang akan
mengisi program, dan papan b dipasang IC Atmega 328p baru yang akan diisi
program. papan (a) disambungkan ke komputer, dan papan (b) disampungkan ke
papan (a).
5.
Membuat
templete file excel
Supaya dapat membuat grafik, maka perlu menyiapkan
templete file excel berupa tabel untuk menampung data jarak dan waktu gerak
kereta dinamika dari sensor, membuat tabel konversi berupa data kecepatan pada
waktu tertentu, dan templete grafik untuk menampilkan data kecepatan fungsi
waktu. Hasil templetenya sebagai berikut.

Gambar 3. Hasil templete file excel untuk akuisis
data dari alat praktikum.
6.
Merangkai
alat percobaan
Langkah selanjutnya adalah merangkai alat controller
dengan komponen percobaan lain berupa rel presisi dari KIT Optik beserta
sampungan rel, balok bertumpuk dari KIT Mekanika, serta kereta dinamika.
Hasilnya sebagai berikut.

Gambar 4. Rangkaian microcontroller pada alat praktikum GLBB.

Gambar 5. Rangkaian alat praktikum GLBB.
7.
Ujicoba
alat
Setelah selesai dirangkai, kemudian alat praktikum ini
diuji keberfungsiannya serta diteliti apakah masih ada kendala teknis dalam
penggunaannya. Tampilan layar excel hasil ujicoba adalah sebagai berikut.

{kind=link}
Subscribe to:
Comments (Atom)