PENGEMBANGAN ALAT
PRAKTIKUM GERAK LURUS MENGGUNAKAN INTERFACE KOMPUTER
oleh : Soni Sukendar
Rita Hartati
A.
Analisis Kebutuhan
Berdasarkan
hasil studi awal dan kajian berbagai bahan pustaka diperoleh spesifikasi
kebutuhan alat praktikum fisika untuk topik GLBB yang dapat memberi solusi
kendala praktikum menggunakan ticker
timer, sebagai berikut.
1.
Alat praktikum yang dapat dirangkai dengan cepat, atau kalau
memungkinkan sudah berupa alat terpadu (modul).
2.
Alat praktikum yang dapat berkomunikasi dengan komputer.
3.
Data yang dikirim oleh alat praktikum ke komputer dapat
diakuisis oleh software pengolah angka dan grafik yang sudah familier di
kalangan pengguna, misalnya MS-Excel.
4.
Tampilan grafik harus menarik dan mudah dipahami siswa.
5.
Harga komponen untuk mengembang alat ini harus relatif murah.
6.
Alat praktikum ini harus mudah dipasang dan dibongkar, serta
mudah untuk digunakan.
7.
Alat praktikum ini dapat dipadukan penggunaanya dengan alat
praktikum yang sudah ada, misalnya KIT fisika.
Dari
spesifikasi tersebut, akhirnya diputuskan untuk mengembangkan alat praktikum
berbasis microcontroller dengan menggunakan IC utama keluaran Atmega seri 328p.
Atmega seri ini sangat mudah untuk diisi program dengan mengunakan lingkungan
pemograman berbasis Arduino. Kelebihan lingkungan pemograman ini dari segi
bahasa sangat sederhana dan dikembangkan dengaan menggunakan bahasa perograman
C. Selain itu cukup banyak tersedia library
dengan lisensi freeware, yang dapat
digunakan untuk menyingkat proses penulisan script terutama scrip untuk
mengakses hardware/ komponen berupa sensor.
Komponen lain yang diperlukan adalah sensor
jarak, dan hasl survey di lapangan dperoleh sensor jarak dengan menggunakan
prinsip kerja pemancaran dan pemantulan gelombang ultrasonik dengan harga yang
cukup murah yaitu sensor ultrasonik HCSR-04. Harga sensor ini sekitar Rp.
35.000.
Untuk koneksi
alat praktikum ke komputer digunakan USB
to serial conector keluaran
prolific seri hxa. Harganya sekitar Rp. 45.000,-.
B. Pembuatan
Alat Praktikum GLBB berbantuan komputer
Setelah
dilakukan analisis kebutuhan, langkah selanjutnya adalah membuat alat prakikum
dengan tahapan sebagai berikut
1. Perancangan rangkaian elektronik
Skema rancangan rangkaian adalah sebagai berikut.
{kind=link}

Gambar 1. Skema rangkaian sistem minimum untuk IC Atmega 328p.
2. Pemilihan komponen
Komponen elektronik yang diperlukan adalah sebagai
berikut.
Tabel 1.
Kebutuhan komponen
Block Controller
|
|
Nama
Komponen
|
Jml
|
IC Atmega
328P-PU
|
1
|
Xtal Resonator
16MHz
|
1
|
C ceramic 22pF
|
2
|
C ceramic 0.1uF
|
2
|
R 1K
|
1
|
R 10K
|
2
|
Tombol reset
|
1
|
led hijau
|
1
|
Block Sensor dan
Actuator
|
|
Nama
Komponen
|
Jml
|
HC SR04
ultrasonik sensor
|
1
|
LCD 1602
|
1
|
mini board
|
2
|
jumper pelangi
10 warna M/M
|
1
|
jumper
|
6
|
3. Menulis script program untuk mikrokontroler
IC Atmega 328p diprogram supaya dapat mengakses data
dari sensor ultrasonik HCSR-04 serta mengirimkan data digitalnya ke komputer
dan dapat dengan mudah diakuisis oleh program MS-Excel. Listing programnya
sebagai berikut.
#include <NewPing.h>
#define TRIGGER_PIN 12 // jumper pin TRIG
sensor ke pin 12 arduino
#define ECHO_PIN 11 // jumper pin ECHO
sensor ke pin 11 arduino
#define MAX_DISTANCE 200 // jarak maks
(cm).
NewPing sonar(TRIGGER_PIN, ECHO_PIN,
MAX_DISTANCE); // bikin class baru
int uS = 0;
int row = 0; //untuk plxdaq
void setup() {
Serial.begin(9600); // buka port serial, sets kecepatan data ke 9600 bps
Serial.println("CLEARDATA");
//untuk plxdaq
Serial.println("LABEL,Waktu,Jarak,Model GLBB oleh Rita Hartati SMKN
13 Bandung"); //untuk plxdaq
}
void loop() {
//Baca pin input
uS
= sonar.ping(); // kirim ping dan simpan hasilnya di variabel uS (satuannya
mikrodetik)
//Kirim ke komputer melalui serial
Serial.print("DATA,TIME,"); Serial.println(uS /
US_ROUNDTRIP_CM);
row++; //untuk plxdaq
uS++; //untuk plxdaq
delay(100);
}
Adapun
library
untuk sensor ultrasonik HCSR-04 diambil dari script yang telah dikembangkan
oleh peneliti lain dengan lisensi free
dari http://www.gnu.org/licenses/gpl-3.0.html
//
---------------------------------------------------------------------------
//
Created by Tim Eckel - teckel@leethost.com
//
Copyright 2012 License: GNU GPL v3 http://www.gnu.org/licenses/gpl-3.0.html
//
// See
"NewPing.h" for purpose, syntax, version history, links, and more.
//
---------------------------------------------------------------------------
#include "NewPing.h"
//
---------------------------------------------------------------------------
//
NewPing constructor
//
---------------------------------------------------------------------------
NewPing::NewPing(uint8_t
trigger_pin, uint8_t echo_pin, int
max_cm_distance) {
_triggerBit =
digitalPinToBitMask(trigger_pin); // Get the port
register bitmask for the trigger pin.
_echoBit =
digitalPinToBitMask(echo_pin); // Get the port register bitmask for the echo pin.
_triggerOutput =
portOutputRegister(digitalPinToPort(trigger_pin)); //
Get the output port register for the trigger pin.
_echoInput =
portInputRegister(digitalPinToPort(echo_pin)); // Get the
input port register for the echo pin.
_triggerMode = (uint8_t *)
portModeRegister(digitalPinToPort(trigger_pin)); //
Get the port mode register for the trigger pin.
_maxEchoTime =
min(max_cm_distance, MAX_SENSOR_DISTANCE) * US_ROUNDTRIP_CM + (US_ROUNDTRIP_CM
/ 2); // Calculate the maximum distance in uS.
#if DISABLE_ONE_PIN == true
*_triggerMode |= _triggerBit; // Set trigger pin to output.
#endif
}
//
---------------------------------------------------------------------------
//
Standard ping methods
//
---------------------------------------------------------------------------
unsigned int
NewPing::ping() {
if
(!ping_trigger()) return NO_ECHO; //
Trigger a ping, if it returns false, return NO_ECHO to the calling function.
while
(*_echoInput & _echoBit) //
Wait for the ping echo.
if (micros() > _max_time) return
NO_ECHO; //
Stop the loop and return NO_ECHO (false) if we're beyond the set maximum
distance.
return
(micros() - (_max_time - _maxEchoTime) - 5); // Calculate
ping time, 5uS of overhead.
}
unsigned int
NewPing::ping_in() {
unsigned
int echoTime = NewPing::ping(); // Calls
the ping method and returns with the ping echo distance in uS.
return
NewPingConvert(echoTime, US_ROUNDTRIP_IN); // Convert
uS to inches.
}
unsigned int
NewPing::ping_cm() {
unsigned
int echoTime = NewPing::ping(); // Calls
the ping method and returns with the ping echo distance in uS.
return
NewPingConvert(echoTime, US_ROUNDTRIP_CM); // Convert
uS to centimeters.
}
unsigned int
NewPing::ping_median(uint8_t it) {
unsigned
int uS[it], last;
uint8_t j, i = 0;
uS[0] = NO_ECHO;
while
(i < it) {
last =
ping(); // Send ping.
if (last == NO_ECHO) { // Ping out of
range.
it--; //
Skip, don't include as part of median.
last
= _maxEchoTime; // Adjust "last" variable
so delay is correct length.
} else { //
Ping in range, include as part of median.
if (i > 0) { //
Don't start sort till second ping.
for (j = i; j > 0 && uS[j - 1] < last;
j--) // Insertion sort loop.
uS[j]
= uS[j - 1]; // Shift ping array to correct position
for sort insertion.
}
else j = 0; //
First ping is starting point for sort.
uS[j]
= last; // Add last ping to
array in sorted position.
i++; //
Move to next ping.
}
if (i < it) delay(PING_MEDIAN_DELAY - (last
>> 10)); // Millisecond delay between pings.
}
return
(uS[it >> 1]); // Return the ping distance
median.
}
//
---------------------------------------------------------------------------
//
Standard ping method support functions (not called directly)
//
---------------------------------------------------------------------------
boolean
NewPing::ping_trigger() {
#if DISABLE_ONE_PIN != true
*_triggerMode |=
_triggerBit; //
Set trigger pin to output.
#endif
*_triggerOutput &=
~_triggerBit; // Set the trigger pin low, should
already be low, but this will make sure it is.
delayMicroseconds(4); // Wait
for pin to go low, testing shows it needs 4uS to work every time.
*_triggerOutput |=
_triggerBit; //
Set trigger pin high, this tells the sensor to send out a ping.
delayMicroseconds(10); // Wait
long enough for the sensor to realize the trigger pin is high. Sensor specs say
to wait 10uS.
*_triggerOutput &=
~_triggerBit; // Set trigger pin back to low.
#if DISABLE_ONE_PIN != true
*_triggerMode &=
~_triggerBit; //
Set trigger pin to input (when using one Arduino pin this is technically setting
the echo pin to input as both are tied to the same Arduino pin).
#endif
_max_time = micros() + MAX_SENSOR_DELAY; //
Set a timeout for the ping to trigger.
while
(*_echoInput & _echoBit && micros() <= _max_time) {} // Wait for echo pin to clear.
while
(!(*_echoInput & _echoBit)) // Wait for ping to start.
if (micros() > _max_time) return
false; //
Something went wrong, abort.
_max_time = micros() +
_maxEchoTime; // Ping started, set the timeout.
return
true; // Ping started successfully.
}
//
---------------------------------------------------------------------------
// Timer
interrupt ping methods (won't work with ATmega8 and ATmega128)
//
---------------------------------------------------------------------------
void NewPing::ping_timer(void (*userFunc)(void))
{
if
(!ping_trigger()) return; // Trigger a
ping, if it returns false, return without starting the echo timer.
timer_us(ECHO_TIMER_FREQ, userFunc);
// Set ping echo timer check every ECHO_TIMER_FREQ
uS.
}
boolean
NewPing::check_timer() {
if
(micros() > _max_time) { // Outside the timeout
limit.
timer_stop(); // Disable
timer interrupt
return false; // Cancel
ping timer.
}
if
(!(*_echoInput & _echoBit)) { // Ping echo
received.
timer_stop(); //
Disable timer interrupt
ping_result =
(micros() - (_max_time - _maxEchoTime) - 13); //
Calculate ping time, 13uS of overhead.
return true; // Return
ping echo true.
}
return
false; // Return
false because there's no ping echo yet.
}
//
---------------------------------------------------------------------------
//
Timer2/Timer4 interrupt methods (can be used for non-ultrasonic needs)
// ---------------------------------------------------------------------------
//
Variables used for timer functions
void (*intFunc)();
void (*intFunc2)();
unsigned long
_ms_cnt_reset;
volatile unsigned
long _ms_cnt;
void NewPing::timer_us(unsigned int
frequency, void (*userFunc)(void)) {
timer_setup(); // Configure
the timer interrupt.
intFunc = userFunc; // User's function to call when there's a timer event.
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
OCR4C = min((frequency>>2)
- 1, 255); // Every count is 4uS, so divide by 4
(bitwise shift right 2) subtract one, then make sure we don't go over 255
limit.
TIMSK4 = (1<<TOIE4); //
Enable Timer4 interrupt.
#else
OCR2A = min((frequency>>2)
- 1, 255); // Every count is 4uS, so divide by 4
(bitwise shift right 2) subtract one, then make sure we don't go over 255
limit.
TIMSK2 |=
(1<<OCIE2A); // Enable Timer2 interrupt.
#endif
}
void NewPing::timer_ms(unsigned long
frequency, void (*userFunc)(void)) {
timer_setup(); //
Configure the timer interrupt.
intFunc =
NewPing::timer_ms_cntdwn; // Timer events are sent here once every ms till user's
frequency is reached.
intFunc2 = userFunc; //
User's function to call when user's frequency is reached.
_ms_cnt = _ms_cnt_reset =
frequency; // Current ms counter and reset value.
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
OCR4C = 249; // Every
count is 4uS, so 1ms = 250 counts - 1.
TIMSK4 = (1<<TOIE4); // Enable Timer4 interrupt.
#else
OCR2A = 249; // Every
count is 4uS, so 1ms = 250 counts - 1.
TIMSK2 |= (1<<OCIE2A); // Enable Timer2 interrupt.
#endif
}
void NewPing::timer_stop() { // Disable timer interrupt.
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
TIMSK4 = 0;
#else
TIMSK2 &=
~(1<<OCIE2A);
#endif
}
//
---------------------------------------------------------------------------
//
Timer2/Timer4 interrupt method support functions (not called directly)
//
---------------------------------------------------------------------------
void NewPing::timer_setup() {
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
timer_stop(); // Disable Timer4 interrupt.
TCCR4A = TCCR4C = TCCR4D =
TCCR4E = 0;
TCCR4B = (1<<CS42) |
(1<<CS41) | (1<<CS40) | (1<<PSR4); //
Set Timer4 prescaler to 64 (4uS/count, 4uS-1020uS range).
TIFR4 = (1<<TOV4);
TCNT4 = 0; // Reset Timer4
counter.
#else
timer_stop(); // Disable
Timer2 interrupt.
ASSR &=
~(1<<AS2); // Set clock, not pin.
TCCR2A = (1<<WGM21); // Set Timer2 to
CTC mode.
TCCR2B = (1<<CS22); // Set Timer2
prescaler to 64 (4uS/count, 4uS-1020uS range).
TCNT2 = 0; // Reset
Timer2 counter.
#endif
}
void NewPing::timer_ms_cntdwn() {
if
(!_ms_cnt--) { // Count down till we reach zero.
intFunc2(); //
Scheduled time reached, run the main timer event function.
_ms_cnt =
_ms_cnt_reset; // Reset the ms timer.
}
}
#if defined
(__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4
(Teensy/Leonardo).
ISR(TIMER4_OVF_vect)
{
#else
ISR(TIMER2_COMPA_vect)
{
#endif
if(intFunc)
intFunc(); // If wrapped function is set, call it.
}
// ---------------------------------------------------------------------------
//
Conversion methods (rounds result to nearest inch or cm).
//
---------------------------------------------------------------------------
unsigned int
NewPing::convert_in(unsigned int echoTime) {
return
NewPingConvert(echoTime, US_ROUNDTRIP_IN); // Convert
uS to inches.
}
unsigned int
NewPing::convert_cm(unsigned int echoTime) {
return
NewPingConvert(echoTime, US_ROUNDTRIP_CM); // Convert
uS to centimeters.
}
4.
Pengisian
program
Setelah selesai menulis script program langkah
selanjutnya adalah mengisi program ke dalam IC Atmega 328p, dengan desain
rangkaian sebagai berikut.
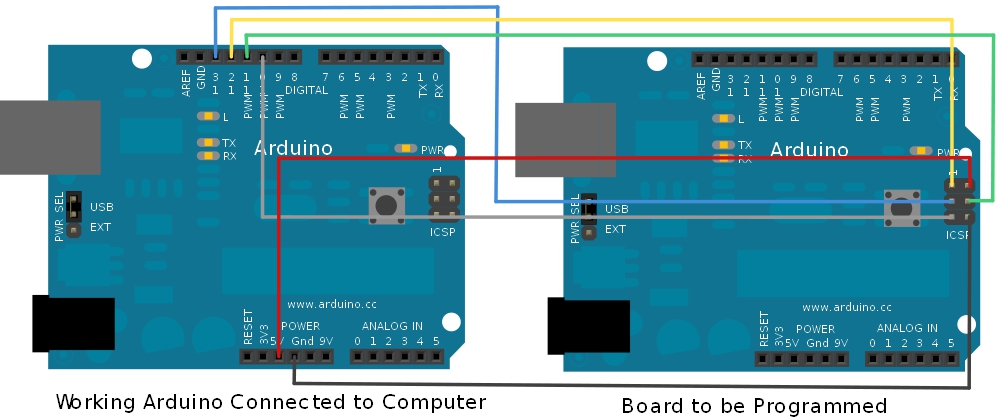{kind=link}

Gambar 2.
Rangkaian pengisian IC Atmega 328p blank.
IC
Atmega 328p yang baru dibeli masih kosong dan tidak dapat diprogram langsung
menggunakan lingkungan pemrogram arduino sehingga perlu diisi bootloader. Supaya IC tersebut siap
dipakai maka peru diprogram menggunakan model ISP (in-Sircuit Programmer)
seperti terlihat pada Gambar 4.2, papan (a) berfungsi sebagai master yang akan
mengisi program, dan papan b dipasang IC Atmega 328p baru yang akan diisi
program. papan (a) disambungkan ke komputer, dan papan (b) disampungkan ke
papan (a).
5.
Membuat
templete file excel
Supaya dapat membuat grafik, maka perlu menyiapkan
templete file excel berupa tabel untuk menampung data jarak dan waktu gerak
kereta dinamika dari sensor, membuat tabel konversi berupa data kecepatan pada
waktu tertentu, dan templete grafik untuk menampilkan data kecepatan fungsi
waktu. Hasil templetenya sebagai berikut.

Gambar 3. Hasil templete file excel untuk akuisis
data dari alat praktikum.
6.
Merangkai
alat percobaan
Langkah selanjutnya adalah merangkai alat controller
dengan komponen percobaan lain berupa rel presisi dari KIT Optik beserta
sampungan rel, balok bertumpuk dari KIT Mekanika, serta kereta dinamika.
Hasilnya sebagai berikut.

Gambar 4. Rangkaian microcontroller pada alat praktikum GLBB.

Gambar 5. Rangkaian alat praktikum GLBB.
7.
Ujicoba
alat
Setelah selesai dirangkai, kemudian alat praktikum ini
diuji keberfungsiannya serta diteliti apakah masih ada kendala teknis dalam
penggunaannya. Tampilan layar excel hasil ujicoba adalah sebagai berikut.

{kind=link}
No comments:
Post a Comment